ńÄŗõĖĆÕćĪ’╝łYifan Wang’╝ē
1989Õ╣┤ńö¤’╝īµŁ”ń®┤ÕĖéµóģÕĘØķĢćõ║║ŃĆéõ╗¢Ķć¬Õ╣╝µłÉń╗®õ╝śÕ╝é’╝īÕģłÕÉÄÕ░▒Ķ»╗õ║ĵŁ”ń®┤ÕĖéÕ«×ķ¬īÕ░ÅÕŁ”ŃĆüµŁ”ń®┤Õ«×ķ¬īõĖŁÕŁ”’╝īÕÉÄõ┐ØķĆüķ╗äÕåłõĖŁÕŁ”ŃĆéµ▒éÕŁ”ĶĘ»õĖŖ’╝īÕłØõĖŁŃĆüķ½śõĖŁÕÉäÕ░▒Ķ»╗õĖżÕ╣┤’╝īÕćŁÕƤń½×ĶĄøõĮ│ń╗®ÕģłÕÉÄõ┐ØķĆüÕīŚÕż¦’╝īµ£¬ÕÅéõĖÄõĖŁĶĆāŃĆüķ½śĶĆā’╝īÕ╣ȵøŠµ¢®ĶÄĘõ║ܵ┤▓ńē®ńÉåń½×ĶĄøķćæńēīŃĆüÕøĮķÖģÕźźµ×ŚÕī╣Õģŗńē®ńÉåń½×ĶĄøķćæńēīŃĆé2011Õ╣┤’╝īńÄŗõĖĆÕćĪÕÅ¢ÕŠŚÕīŚõ║¼Õż¦ÕŁ”ńē®ńÉåÕŁ”ÕŁ”ÕŻ½ÕŁ”õĮŹ’╝ī2016Õ╣┤ĶÄĘÕŠŚĶŖØÕŖĀÕōźÕż¦ÕŁ”ĶĮ»ńē®Ķ┤©ńē®ńÉåÕŁ”ÕŹÜÕŻ½ÕŁ”õĮŹŃĆé2017Ķć│2020Õ╣┤Õ£©ÕŖĀÕĘ×ńÉåÕĘźÕŁ”ķÖóÕ«īµłÉÕŹÜÕŻ½ÕÉÄńĀöń®Č’╝ī2020Õ╣┤12µ£łĶĄĘõ╗╗Ķüīõ║ĵ¢░ÕŖĀÕØĪÕŹŚµ┤ŗńÉåÕĘźÕż¦ÕŁ”’╝īńÄ░õĖ║Ķ»źµĀĪµ£║µó░õĖÄĶł¬ń®║Ķł¬Õż®ÕĘźń©ŗÕŁ”ķÖóµĢֵijŃĆé
õ╗¢ÕĖ”ķóåµ£║ÕÖ©õ║║µØɵ¢ÖńĀöń®ČÕøóķś¤’╝īµĘ▒ĶĆĢĶĮ»õĮōµ£║ÕÖ©õ║║ŃĆüÕŖøÕŁ”ĶČģµØɵ¢ÖŃĆü3DµēōÕŹ░ÕģłĶ┐øÕłČķĆĀŃĆüõ║║µ£║õ║żõ║ÆńĢīķØóńŁēµ¢╣ÕÉæ’╝īÕÉīµŚČµŗģõ╗╗ÕøĮķÖģµ£¤ÕłŖŃĆŖMechanics of MaterialsŃĆŗÕē»õĖ╗ń╝¢ŃĆé2025Õ╣┤’╝īõ╗¢ĶÄĘĶ»äÕŹŚµ┤ŗńÉåÕĘźÕż¦ÕŁ”ÕĘźń©ŗÕŁ”ķÖóńĀöń®ČķØÆÕ╣┤µĢÖÕæśÕź¢’╝īń¦æńĀöÕ«×ÕŖøÕżćÕÅŚĶé»Õ«ÜŃĆé
ÕŹŚµ┤ŗńÉåÕĘźÕż¦ÕŁ”ńÄŗõĖĆÕćĪµĢֵijÕøóķś¤ŃĆŖSCI.Adv.ŃĆŗµ¢░ń¬üńĀ┤’╝Ü
µēōķĆĀķ½śµĢłõ║║µ£║ÕŹÅõĮ£ńÜäÕżÜķĆÜķüōµ¤öµĆ¦ĶéīĶéēńöĄķś╗µŖŚõ╝Āµä¤ÕÖ©
ÕĮōÕēŹÕĖĖńö©ńÜäõ║║õĮōÕŖ©õĮ£µä¤ń¤źµēŗµ«ĄÕżÜõŠØĶĄ¢ĶéīńöĄÕøŠ’╝łEMG’╝ē’╝īõĮåĶéīńöĄÕŬĶāĮĶ«░ÕĮĢńź×ń╗ŵ┐Ƶ┤╗Õ╝ĢÕÅæńÜäõĖ╗ÕŖ©ĶéīÕÅŹÕ║ö’╝īÕ»╣õ║ÄÕāŵŗ«µŖŚĶéīńÜäĶó½ÕŖ©ÕÅśÕī¢ÕŹ┤µŚĀĶāĮõĖ║ÕŖøŃĆéĶĆīFMEISķććńö©ńöĄķś╗µŖŚµĄŗķćÅÕĤńÉå’╝ÜķĆÜĶ┐ćÕÉæńÜ«ĶéżĶĪ©ķØóµ│©ÕģźÕ«ēÕģ©ŃĆüõĮÄÕ╝║Õ║”ńÜäķ½śķóæńöĄµĄü’╝īµÄóµĄŗõĖŹÕÉīĶéīĶéēńŖȵĆüõĖŗńö¤ńē®ń╗äń╗ćńöĄÕ»╝ńē╣µĆ¦ńÜäÕÅśÕī¢ŃĆé
µø┤ķćŹĶ”üńÜ䵜»’╝īĶ»źń│╗ń╗¤µŚĀķ£ĆĶéīĶéēõ║¦ńö¤µśÄµśŠÕŖ©õĮ£õ┐ĪÕÅĘ’╝īÕ░▒ĶāĮŌĆ£µä¤ń¤źŌĆصōŹõĮ£ĶĆģńÜäµäÅÕøŠŃĆ鵌ĀĶ«║µś»ÕĘźõĖÜÕŹÅõĮ£õĖŁÕ»╣ÕŠ«Õ░ÅĶéīĶéēÕÅŹÕ║öńÜäńøæµĄŗ’╝īĶ┐śµś»Õ║ĘÕżŹĶ┐ćń©ŗõĖŁÕ»╣ĶéīÕŖøÕÅśÕī¢ńÜäĶ»äõ╝░’╝īÕ«āķāĮµ»öõ╝Āń╗¤µ¢╣µ│Ģµø┤Ķ┤┤Ķ┐æń£¤Õ«×ķ£Ćµ▒éŃĆé
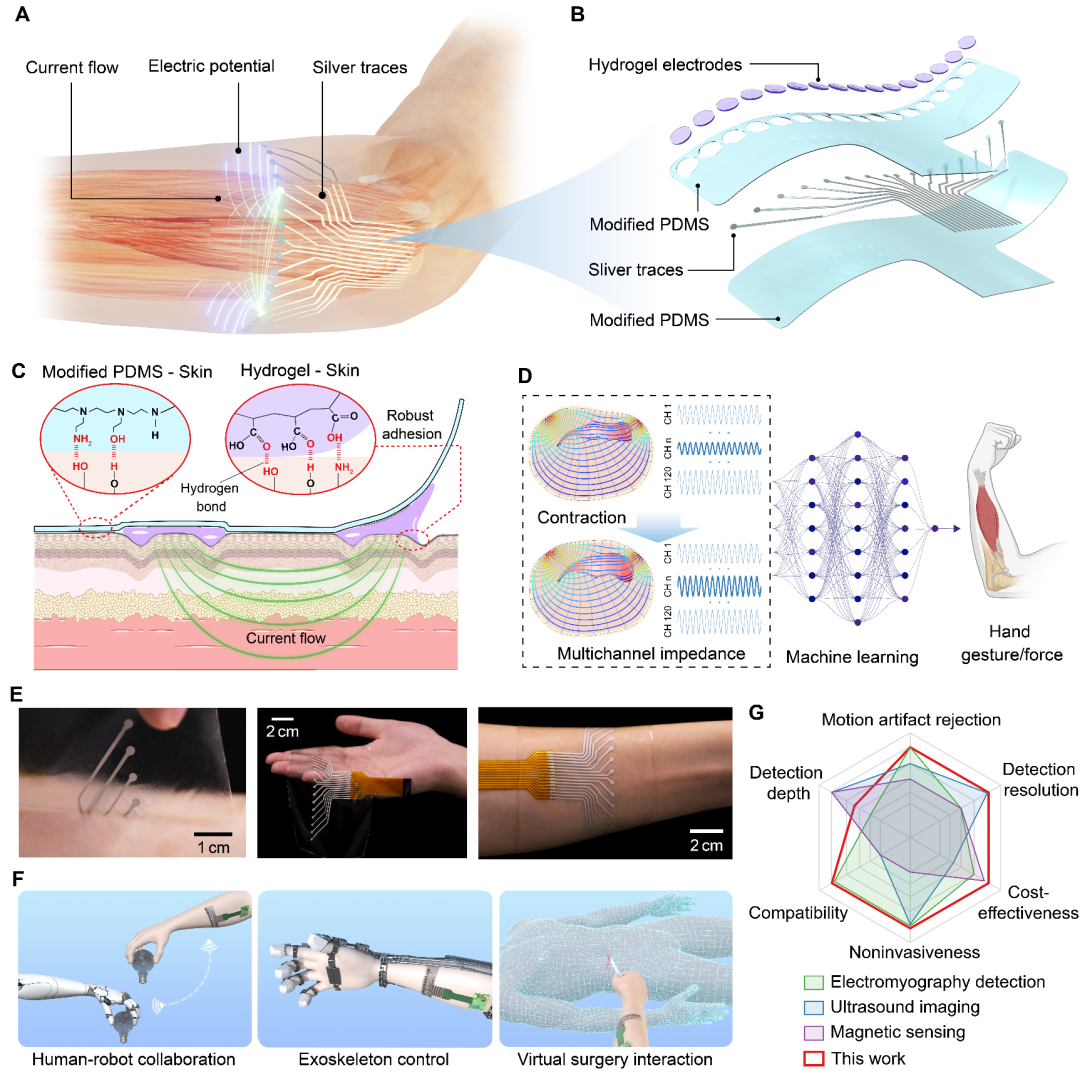
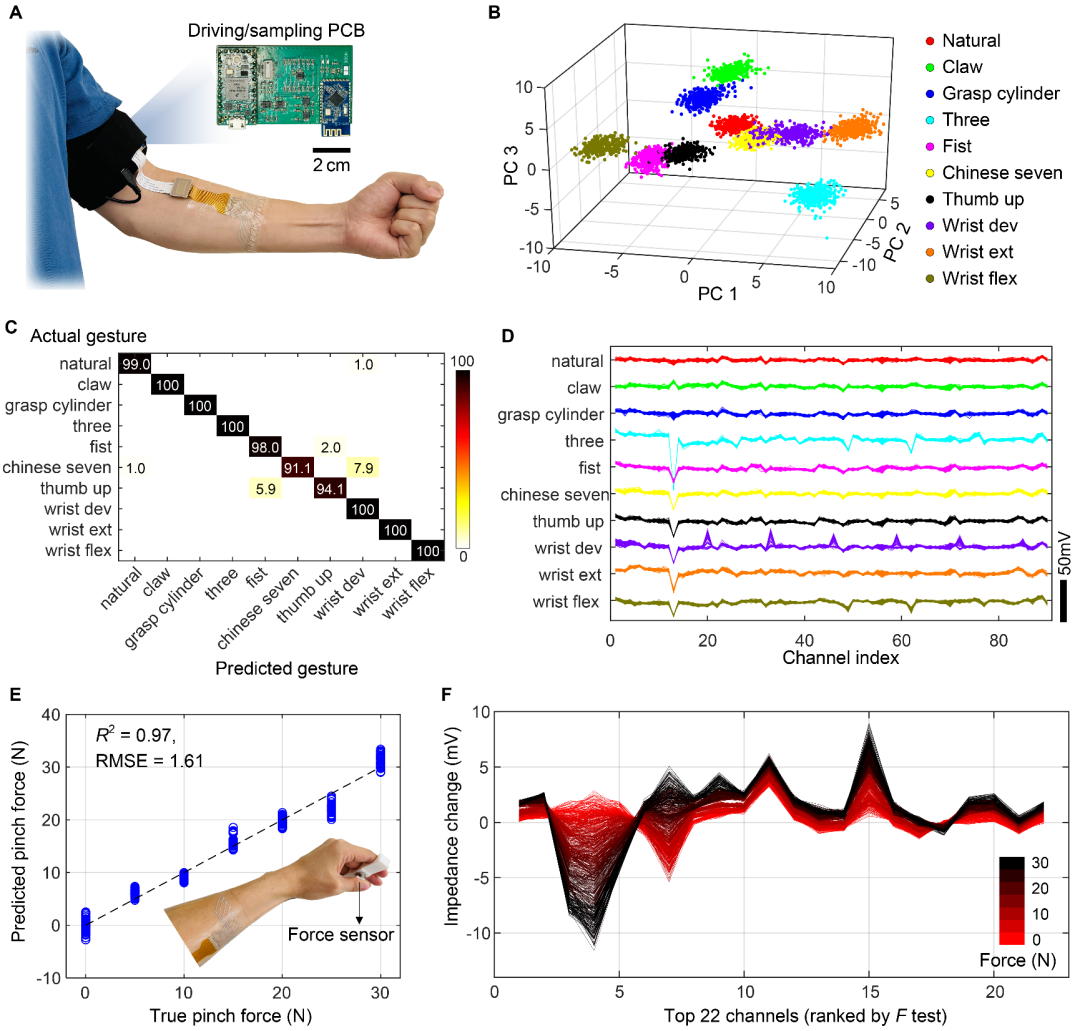
ÕøŠ1’╝ܵ¤öµĆ¦ÕżÜķĆÜķüōĶéīĶéēńöĄķś╗µŖŚõ╝Āµä¤ÕÖ©’╝łFMEIS’╝ē
ŌĆ£Ķ┤┤õĖŖŌĆØńÜ«ĶéżÕ░▒ĶāĮńö©’╝īĶĮ╗Ķ¢äÕÅłĶĆÉńö©’╝ü
FMEISńÜäń╗ōµ×äõ╣¤µ×üÕģĘÕłøµ¢░µĆ¦’╝ܵĢ┤ÕźŚõ╝Āµä¤ÕÖ©Õ”éÕłøÕÅ»Ķ┤┤Ķł¼ĶĮ╗Ķ¢ä’╝łÕÄÜÕ║”õ╗ģ220ÕŠ«ń▒│’╝ē’╝īµ¤öĶĮ»Õ║”µ×üķ½ś’╝łµØ©µ░ŵ©ĪķćÅń║”212.8 kPa’╝ē’╝īÕÅ»ÕżÜµ¼ĪķćŹÕżŹõĮ┐ńö©ŃĆéÕģČÕåģķā©ķøåµłÉõ║åõ╝Ėń╝®µĆ¦Õ»╝ńöĄńĮæń╗£ŃĆüÕ»╝ńöĄµ░┤ÕćØĶāČńöĄµ×üÕÆīķ½śń▓śµĆ¦ĶĪ©ńÜ«ń▓śķÖäÕ▒é’╝īÕŹ│õĮ┐ńö©µłĘĶ┐øĶĪīÕē¦ńāłĶ┐ÉÕŖ©’╝īõŠØńäČĶāĮõ┐صīüń©│Õ«ÜĶ┤┤ÕÉłõĖĵĖģµÖ░õ┐ĪÕÅĘķććķøåŃĆé
ĶĪ©ķØóķććńö©µö╣µĆ¦PDMSµØɵ¢Ö’╝īÕģĘÕżćõĖÄńÜ«ĶéżÕłåÕŁÉÕĮóµłÉµ░óķö«ńÜäĶāĮÕŖø’╝īõĮ┐ÕģČķćŹÕżŹõĮ┐ńö©ÕÉÄõ╣¤õĖŹõ╝ÜÕć║ńÄ░Ķä▒ĶÉĮµł¢õ┐ĪÕÅĘõĖóÕż▒ŃĆé
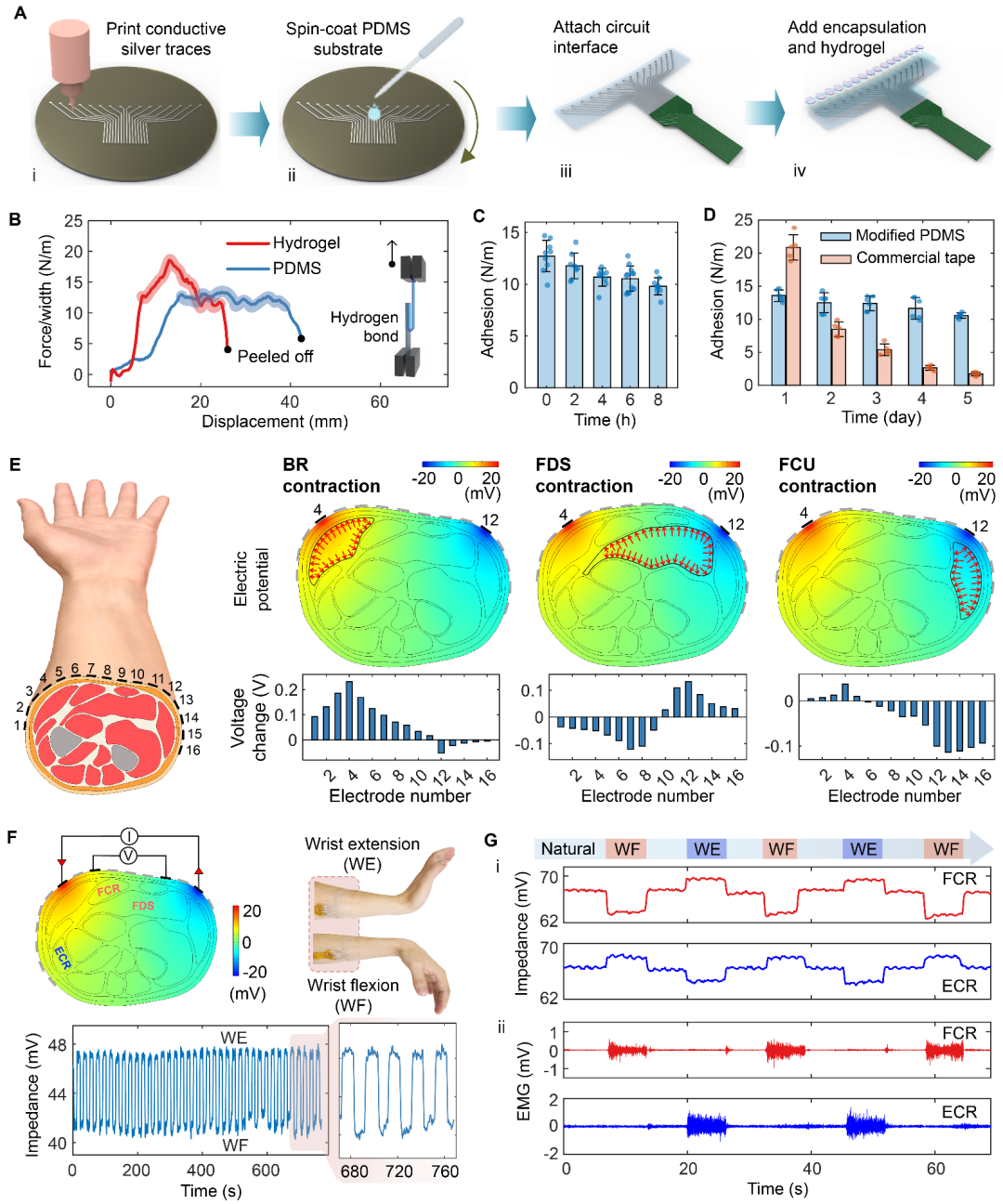
ÕøŠ2’╝ÜFMEISńÜäµŗēõ╝ĖŃĆüķ╗ÅķÖäµĆ¦ĶāĮÕÅŖÕģČÕżÜĶéīĶéēµöČń╝®µä¤ń¤ź
ń▓ŠÕćåĶ»åÕł½+ÕŖøķćÅķó䵥ŗ’╝īFMEISµĀʵĀĘÕ£©ĶĪī’╝ü
Õ£©µēŗÕŖ┐Õłåń▒╗Õ«×ķ¬īõĖŁ’╝īFMEISń╗ōÕÉłń«Śµ│Ģ’╝īÕÅ»Õ░åÕĖĖĶ¦üÕŖ©õĮ£Ķ»åÕł½ÕćåńĪ«ńÄćµÅÉÕŹćĶć│98.5%’╝øÕ£©ĶéīĶéēÕÅæÕŖøķó䵥ŗõ╗╗ÕŖĪõĖŁ’╝īR┬▓µīćµĀćķ½śĶŠŠ0.98’╝īĶ»┤µśÄķó䵥ŗµĢłµ×£ÕŹüÕłåń▓ŠÕćå’╝øµø┤õ╗żõ║║µāŖÕ¢£ńÜ䵜»’╝īÕ«āĶāĮµä¤ń¤źńÜ«õĖŗ30µ»½ń▒│õ╗źÕåģńÜäµĘ▒Õ▒éĶéīĶéēńŖȵĆü’╝īÕ»╣õ╝Āń╗¤EMGŌĆ£ń£ŗõĖŹĶ¦üŌĆØńÜäÕī║Õ¤¤õ╣¤ĶāĮŌĆ£õĖĆńĮæµēōÕ░ĮŌĆØŃĆé
ÕøŠ3’╝ÜFMEISµēŗÕŖ┐Õłåń▒╗ÕÆīĶéīĶéēÕŖøÕø×ÕĮÆķó䵥ŗ
Ķ¦åķóæ1’╝ÜFMEISµÄ¦ÕłČµ£║µó░ĶćéÕ¦┐µĆü
õĖēÕż¦Õ║öńö©Õ£║µÖ»µ╝öńż║’╝Ü
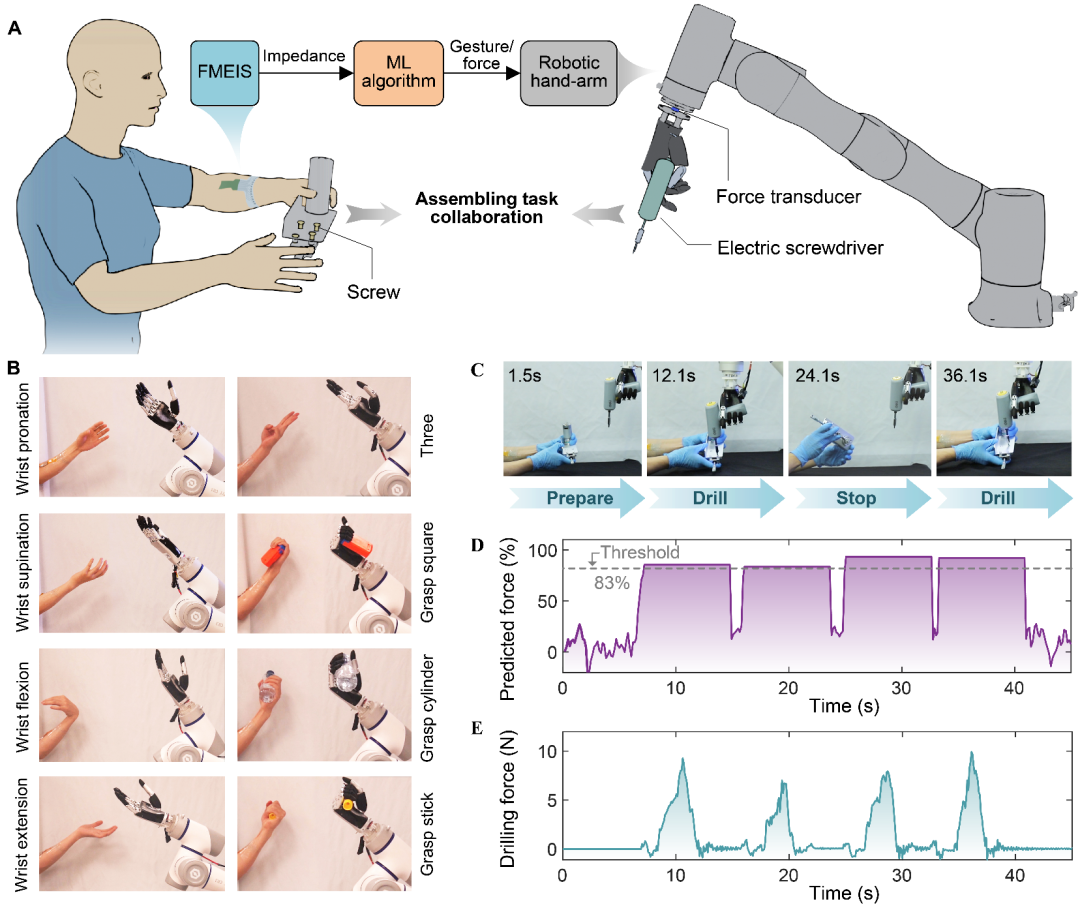
Ō£ģ õ║║µ£║ÕŹÅõĮ£’╝ÜÕ£©ÕĘźõĖÜń╗äĶŻģµł¢ķ½śń▓ŠÕ║”õĮ£õĖÜńÄ»ÕóāõĖŁ’╝īµōŹõĮ£ĶĆģÕŠĆÕŠĆķ£ĆĶ”üÕ┐½ķƤŃĆüĶć¬ńäČÕ£░õĖÄÕŹÅõĮ£µ£║ÕÖ©õ║║ķģŹÕÉłÕ«īµłÉÕżŹµØéõ╗╗ÕŖĪŃĆéõ╝Āń╗¤õ╝Āµä¤ÕÖ©õŠØĶĄ¢µśŠĶæŚÕŖ©õĮ£µł¢ĶéīńöĄõ┐ĪÕÅʵēŹĶāĮĶ»åÕł½µōŹõĮ£ĶĆģµäÅÕøŠ’╝īÕōŹÕ║öÕŁśÕ£©µ╗×ÕÉÄŃĆéĶĆīFMEISÕŻգ©ĶéīĶéēÕŠ«µöČń╝®ŃĆüÕ░ܵ£¬õ║¦ńö¤µśÄµśŠÕŖ©õĮ£ńÜ䵌®µ£¤ķśČµ«Ą’╝īÕćåńĪ«µŹĢµŹēµōŹõĮ£ĶĆģÕŹ│Õ░åĶ┐øĶĪīµ¤ÉõĖƵōŹõĮ£ńÜäÕĆŠÕÉæµĆ¦ÕŖ©õĮ£µīćõ╗żŃĆéķĆÜĶ┐ćĶ┐Öń¦ŹŌĆ£ķóäµä¤ń¤źŌĆص£║ÕłČ’╝īFMEISµłÉÕŖ¤ķ®▒ÕŖ©µ£║µó░ĶćéõĖÄõ║║ń▒╗µōŹõĮ£ĶĆģÕ«×ńÄ░õ║åķ½śń▓ŠÕ║”ÕÉīµŁźķģŹÕÉł’╝īµśŠĶæŚµÅÉÕŹćõ║åÕĘźõĮ£µĢłńÄćõĖÄÕ«ēÕģ©µĆ¦’╝īÕ░żÕģČķĆéńö©õ║Äķ£Ćń▓ŠÕćåÕŖ©õĮ£ÕŹÅÕÉīńÜäÕĘźõĖÜńö¤õ║¦ŃĆüĶŻģķģŹń║┐ÕŹÅõĮ£ÕÆīÕŹ▒ķÖ®ńÄ»ÕóāõĮ£õĖÜõĖŁŃĆé
ÕøŠ4’╝ÜFMEISńÜäõ║║µ£║ÕŹÅõĮ£Õ║öńö©
Ķ¦åķóæ2’╝ÜFMEISÕ«×ńÄ░õ║║µ£║ÕŹÅõĮ£
Ō£ģ Õż¢ķ¬©ķ¬╝ĶŠģÕŖ®’╝ÜÕ£©Õ║ĘÕżŹĶ«Łń╗āµł¢ÕŖ│ÕŖ©ÕŖøÕó×Õ╝║Õ£║µÖ»õĖŁ’╝īFMEISÕÅ»õĮ£õĖ║Õż¢ķ¬©ķ¬╝ń│╗ń╗¤ńÜäŌĆ£ńź×ń╗ÅõĖŁµ×óŌĆØ’╝īµĀ╣µŹ«ńö©µłĘĶéīĶéēńÜäÕŖøķćÅĶŠōÕć║ĶČŗÕŖ┐’╝īÕŖ©µĆüĶ░āĶŖéÕż¢ķ¬©ķ¬╝ńÜäĶŠģÕŖ®ÕŖøŃĆéÕ£©Õ«×ķ¬īõĖŁ’╝īFMEISķ®▒ÕŖ©ńÜäµ░öÕŖ©µēŗķā©Õż¢ķ¬©ķ¬╝Õ»╣µÅĪÕŖøÕÅśÕī¢ÕōŹÕ║öĶ┐ģķƤ’╝īÕ╣│ÕØćÕ╗ČĶ┐¤õ╗ģ756µ»½ń¦Æ’╝īÕ╣ČÕ£©Õó×Õ╝║µĄŗĶ»ĢõĖŁõĮ┐µ£ĆÕż¦µÅĪÕŖøµÅÉÕŹćõ║åń║”65%ŃĆéµø┤ķćŹĶ”üńÜ䵜»’╝īÕ£©ķĢ┐µŚČķŚ┤µÅĪµīüķćŹńē®ńÜäÕ«×ķ¬īõĖŁ’╝īFMEISµÄ¦ÕłČõĖŗńÜäÕż¢ķ¬©ķ¬╝ĶāĮÕż¤µ£ēµĢłÕćÅń╝ōĶéīĶéēń¢▓ÕŖ│ńÜäÕÅæńö¤’╝īÕ╗ČķĢ┐µōŹõĮ£µīüń╗ŁµĆ¦ŃĆéĶ┐Öń¦Źķ½śķĆéÕ║öµĆ¦ńÜäÕŖ®ÕŖøń│╗ń╗¤ńē╣Õł½ķĆéńö©õ║ÄĶéīĶéēÕŖ¤ĶāĮÕćÅķĆĆĶĆģńÜäÕ║ĘÕżŹĶ«Łń╗āŃĆüķ½śÕ╝║Õ║”õĮ£õĖÜõ║║ÕæśńÜäõĮōÕŖøĶĪźÕü┐’╝īõ╗źÕÅŖĶĆüÕ╣┤ńŠżõĮōńÜäĶŠģÕŖ®ńö¤µ┤╗Õ£║µÖ»ŃĆé
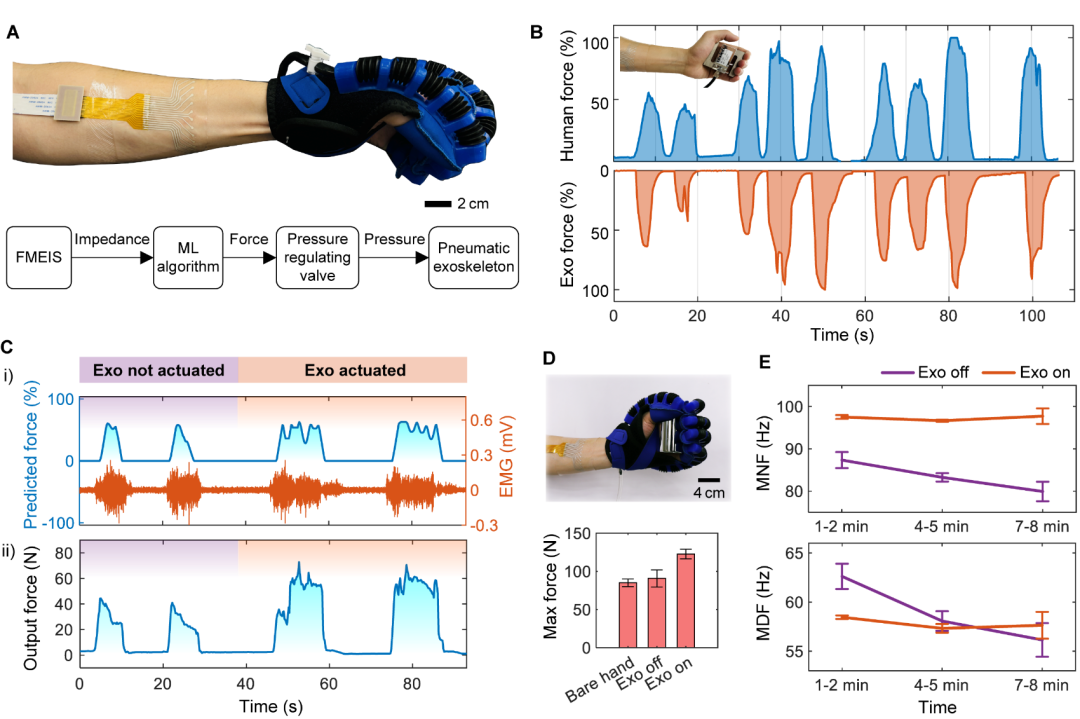
ÕøŠ5’╝ÜFMEISµÄ¦ÕłČÕż¢ķ¬©ķ¬╝Õ«×ńÄ░ÕŖ®ÕŖø
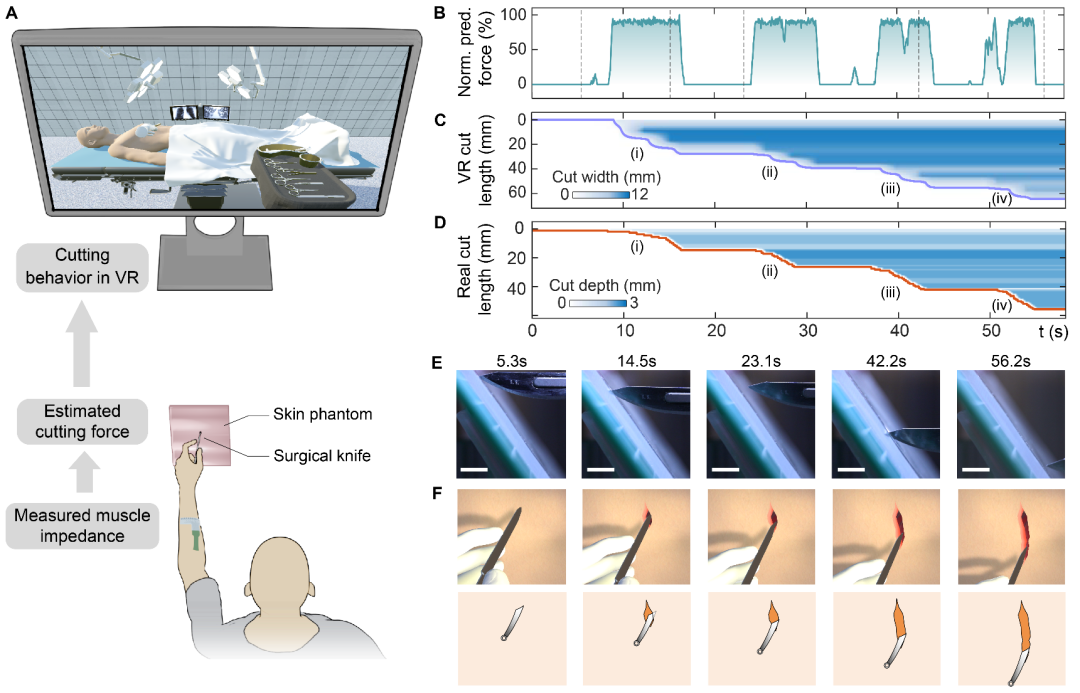
Ō£ģ ĶÖܵŗ¤µēŗµ£»ń│╗ń╗¤’╝ÜÕ£©Ķ┐£ń©ŗÕī╗ń¢Śµł¢Õż¢ń¦æĶ«Łń╗āõĖŁ’╝īÕ”éõĮĢÕ░åÕī╗ńö¤µēŗķā©ÕŖ©õĮ£õĖÄĶÖܵŗ¤ńÄ»Õóāķ½śń▓ŠÕ║”Õ»╣µÄźõĖĆńø┤µś»µĀĖÕ┐āµīæµłśŃĆéFMEISÕ£©Ķ»źķóåÕ¤¤ńÜäÕ║öńö©ń¬üńĀ┤õ║åõ╝Āń╗¤Õ¤║õ║ĵēŗÕŖ┐µł¢ÕŖøõ╝Āµä¤ÕÖ©µÄ¦ÕłČńÜäÕ▒ĆķÖÉ’╝īÕ«āÕŻի׵ŚČµä¤ń¤źµōŹõĮ£ĶĆģńÜäµēŗķā©Õ¦┐µĆüõĖÄÕÅæÕŖøńŖȵĆü’╝īÕ╣ČÕ░åĶ┐Öõ║øĶéīĶéēõ┐ĪÕÅĘĶĮ¼Õī¢õĖ║ĶÖܵŗ¤µēŗµ£»ÕłĆÕ£©VRńÄ»ÕóāõĖŁńÜäń▓ŠÕćåĶĮ©Ķ┐╣µÄ¦ÕłČŃĆéÕ£©µ©Īµŗ¤µēŗµ£»Õ«×ķ¬īõĖŁ’╝īń│╗ń╗¤µĀ╣µŹ«ńö©µłĘĶéīĶéēĶŠōÕć║Õ╝║Õ║”Ķć¬ÕŖ©Ķ░āĶŖéÕłćÕē▓ĶĘ»ÕŠäńÜäķƤÕ║”ŃĆüµĘ▒Õ║”õĖÄÕ«ĮÕ║”’╝īÕ«×ńÄ░õ║åńē®ńÉåÕŖ©õĮ£õĖÄĶÖܵŗ¤ÕōŹÕ║öńÜ䵌Āń╝ØĶĆ”ÕÉłŃĆéĶ»źµŖƵ£»õĖ║Õ╝ĆÕÅæµŚĀķ£Ćń£¤Õ«×µēŗµ£»ÕÖ©µó░ŃĆüõĮåÕģĘÕżćķ½śÕ║”µōŹõĮ£Ķ┐śÕĤÕ║”ńÜäĶÖܵŗ¤µēŗµ£»ń│╗ń╗¤µÅÉõŠøõ║åńÉåµā│Ķ¦ŻÕå│µ¢╣µĪł’╝īµ£¬µØźÕÅ»Õ╣┐µ│øÕ║öńö©õ║ÄĶ┐£ń©ŗµēŗµ£»ŃĆüµĢÖÕŁ”Ķ«Łń╗āÕÆīµ£»ÕēŹµ©Īµŗ¤ńŁēķóåÕ¤¤ŃĆé
ÕøŠ6’╝ÜFMEISµÄ¦ÕłČĶÖܵŗ¤ńÄ░Õ«×µēŗµ£»
Ķ¦åķóæ3’╝ÜFMEISõĮ£õĖ║ĶÖܵŗ¤ńÄ░Õ«×µēŗµ£»µÄźÕÅŻ
µø┤Õ«ēÕģ©ŃĆüµø┤ķĆÜńö©ŃĆüµø┤õ║║µĆ¦Õī¢’╝Ü
FMEISõĮ┐ńö©ńÜäńöĄµĄüõĖ║ÕÅīÕÉæõ║żµĄüÕŠ«ńöĄµĄü’╝īÕ«īÕģ©ń¼”ÕÉłõ║║õĮōķĢ┐µ£¤õĮ┐ńö©ńÜäÕ«ēÕģ©µĀćÕćåŃĆéÕ£©õ┐ĪÕÅĘķććķøåµ¢╣ķØó’╝īÕ«āĶ┐śĶāĮõĖÄõ╝Āń╗¤ĶéīńöĄĶ«ŠÕżćÕģ╝Õ«╣Õģ▒ńö©’╝īķü┐ÕģŹµĢ░µŹ«Õ╣▓µē░ŃĆéĶ┐Öń¦ŹÕÅ»ń®┐µł┤ŃĆüķ½śń▓ŠÕ║”ŃĆüõĮÄÕ╗ČĶ┐¤ńÜäµä¤ń¤źµ¢╣Õ╝Å’╝īµĀćÕ┐ŚńØƵ¢░õĖĆõ╗ŻŌĆ£µćéõĮĀĶ║½õĮōĶ»ŁĶ©ĆŌĆØńÜäõ║║µ£║ńĢīķØóµŁŻÕ£©Õ┐½ķƤÕ┤øĶĄĘŃĆé

Ķ»źńĀöń®Čńö▒ÕŹŚµ┤ŗńÉåÕĘźÕż¦ÕŁ”ńÄŗõĖĆÕćĪµĢֵijķóåÕ»╝’╝īµØÄÕÉøÕ©üÕŹÜÕŻ½õĖ║ń¼¼õĖĆõĮ£ĶĆģ’╝īńĀöń®ČÕŠŚÕł░õ║åµ¢░ÕŖĀÕØĪń¦æµŖĆńĀöń®ČÕ▒ĆõĖÄÕŹŚµ┤ŗÕŖ®ńÉåµĢÖµÄłÕ¤║ķćæńÜäĶĄäÕŖ®ŃĆé




